Highlights
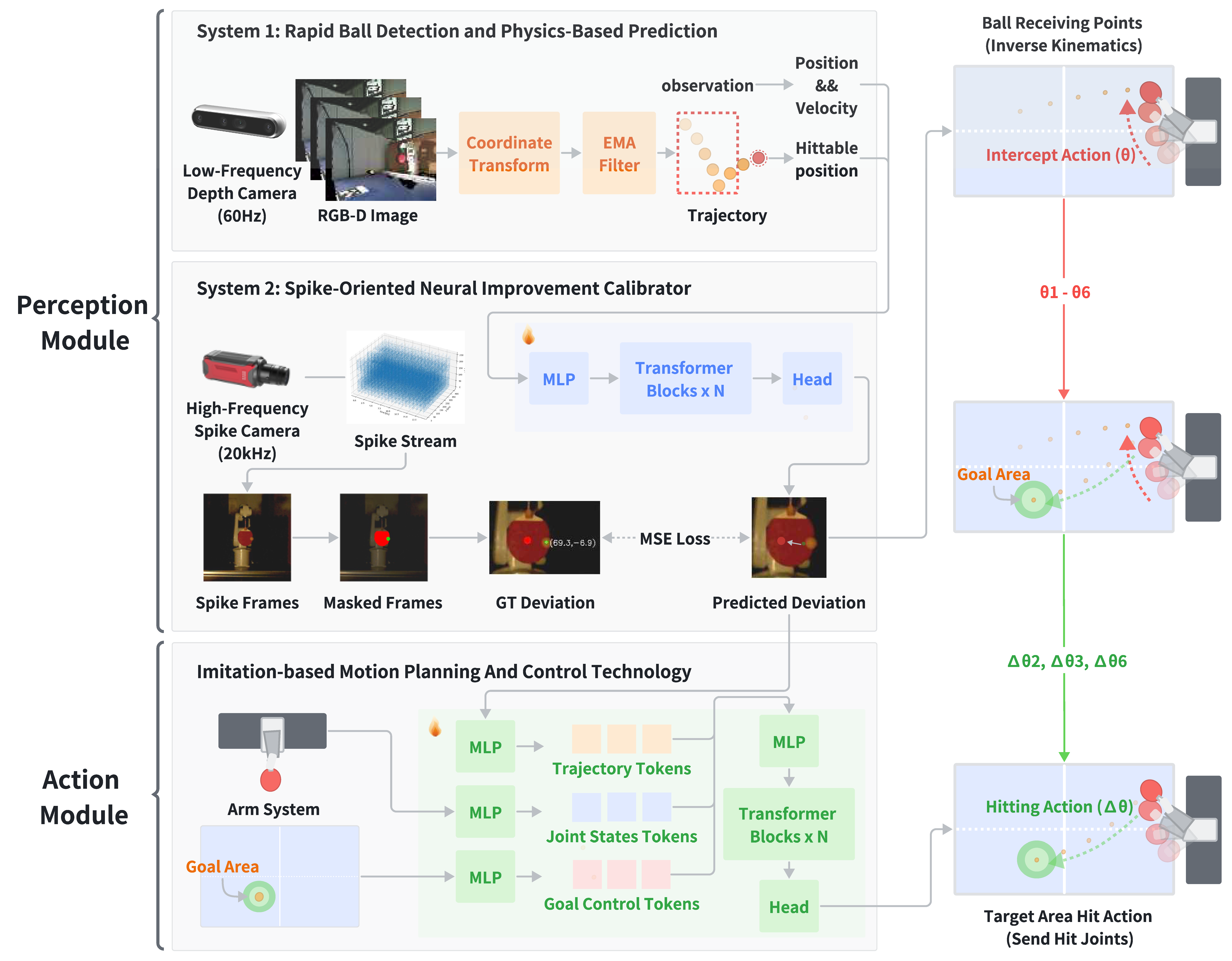
- We design and implement a comprehensive robotic table tennis system that systematically addresses high-speed dynamic manipulation through task-specific decomposition and Fast-Slow architecture.
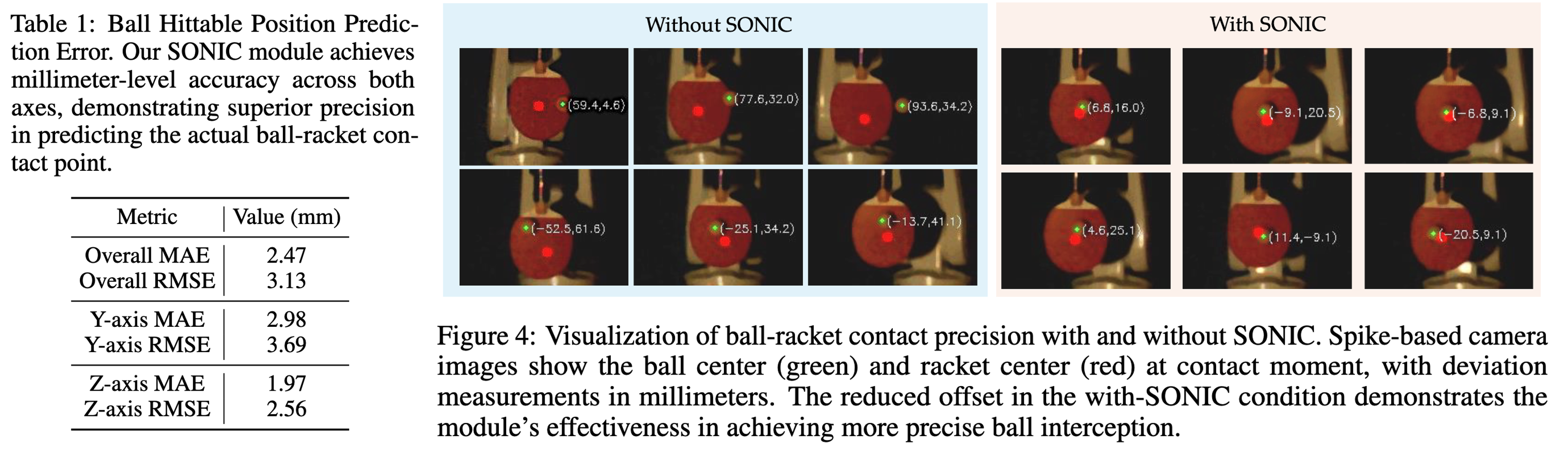
- We develop a Fast-Slow system perception framework that enables accurate trajectory prediction using conventional cameras through neural error correction, complemented by real-world imitation learning for precise ball striking control.
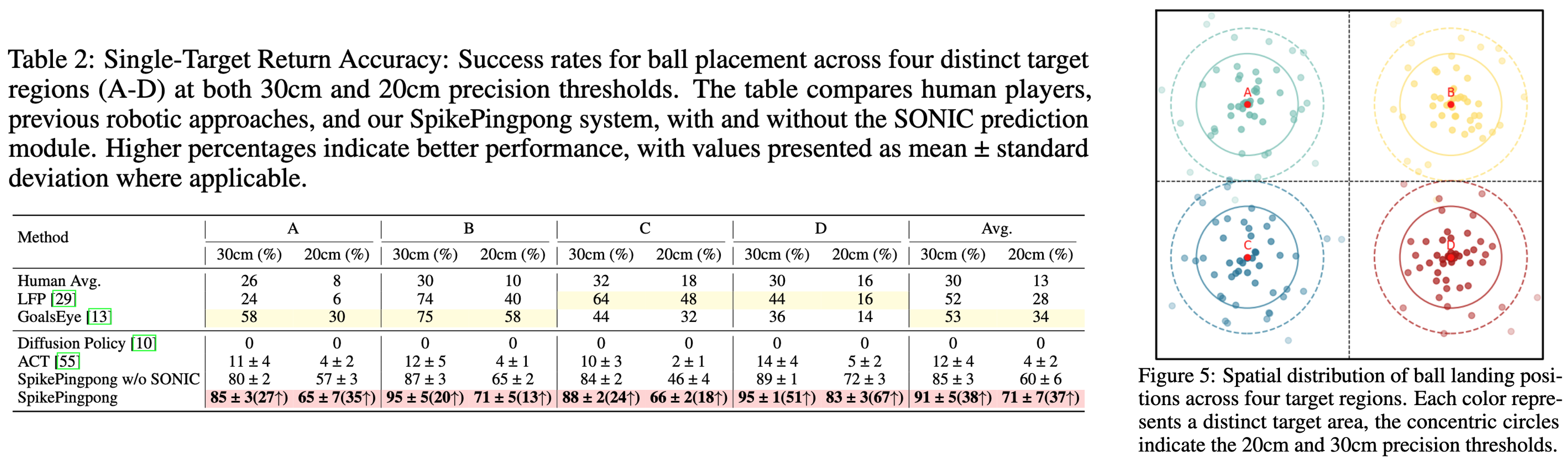
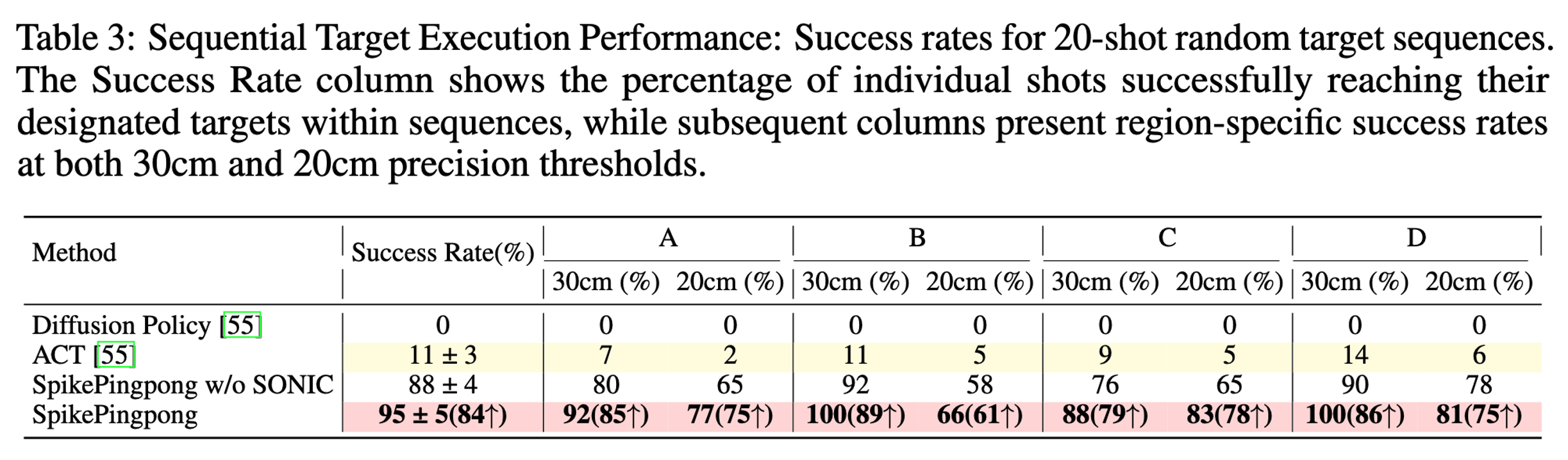
- We conduct extensive experimental evaluation demonstrating superior performance with 92% success rate in 30cm zones and 70% accuracy in challenging 20cm precision targeting, validating the effectiveness of our integrated approach.